







Road Surface Profilometer MK IV
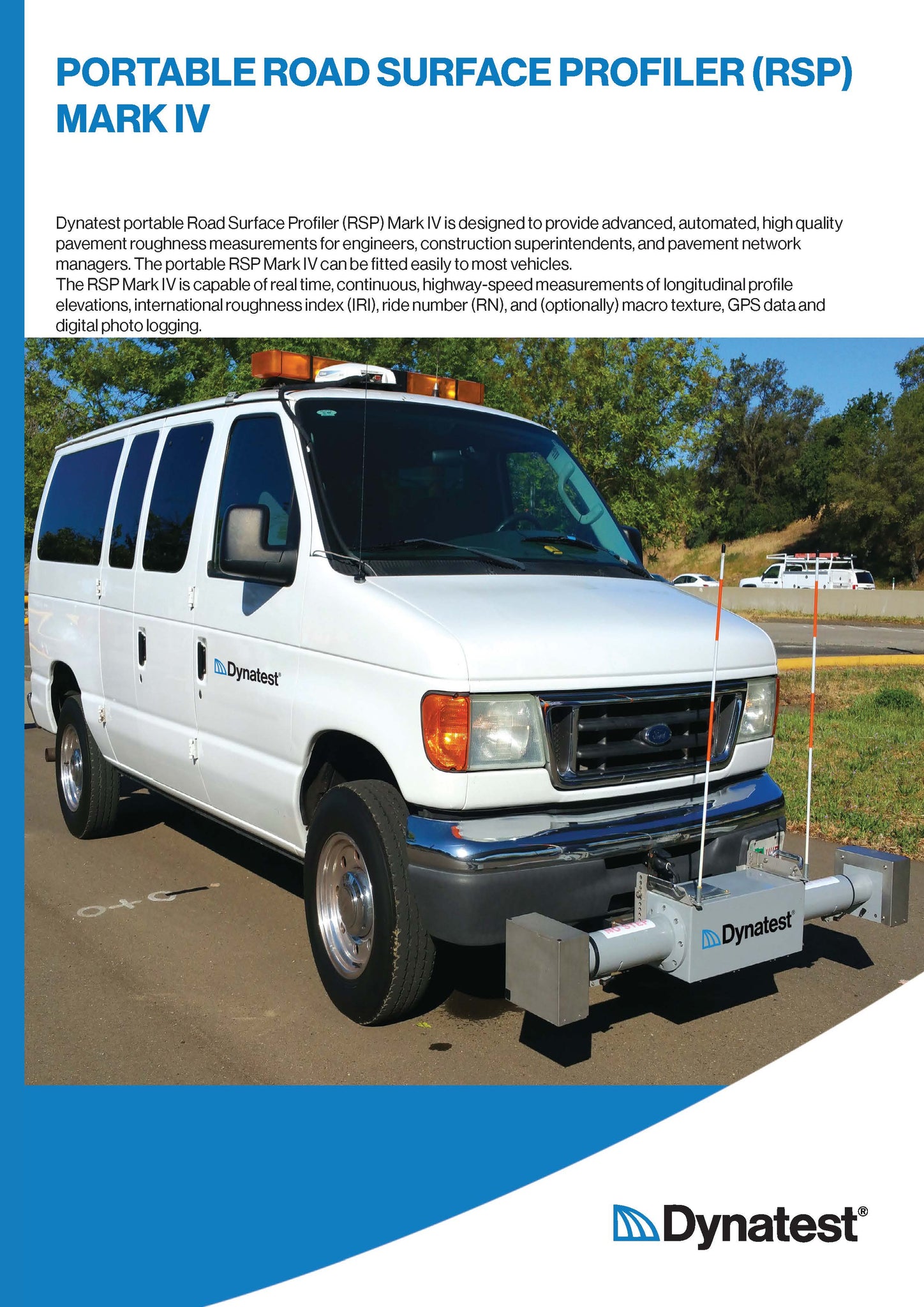
The portable Road Surface Profiler MK IV can be fitted easily to most vehicles and is capable of real-time, continuous, highway-speed measurements.
The Road Surface Profiler MK IV is the portable version easily attached to any vehicle with the capability to attach 1 or 2 lasers. Options include texture-capable lasers, DGPS, and ROW cameras.
The Dynatest 5051 MK IV Road Surface Profilometer measures a number of indices and characteristics including the longitudinal profile, International Roughness Index (IRI), Ride Number (RN), transverse profile & macrotexture. The system can also provide data for the Boeing Bump Index (BBI) calculation. The RSP has a unique “Stop & Go” functionality enabling the equipment to operate in an efficient manner in urban areas, at traffic lights, stop signs, junctions, and roundabouts, making it an ideal tool for data collection on both urban and rural networks. The equipment meets the ASTM E950 Class 1, AASHTO R57, and State road standards, such as the Tex-1001-S, for accuracy, ensuring that the data can be used for project and network evaluation and in Pavement Management Systems.
Key benefits
-
Rapid roughness screening of all network sections
-
Operates at traffic speed so no traffic management is required
-
Offers real time data collection, analysis and storage, saving precious engineering time for post-processing of data
-
Texture lasers can collect both IRI/RN and macrotexture data simultaneously in a single run
-
Automated monitoring of laser readings ensures high quality of data
-
Highly accurate, repeatable, and reproducible data allowing data to be used in Dynatest’s Pavement Management Software (PMS)
-
Modular system, is easy to maintain, service, and upgrade
-
“Stop and Go” feature allows for testing of short sections and urban streets, making the RSP an ideal tool for project level as well as network-level data collection and analysis
-
With the GPS option, all data can be geo-referenced allowing plotting in a Geographic Information Systems (GIS) system
-
The RSPwin Field program gives step by step guide for the calibration of lasers, accelerometers, and Distance Measuring Instrument (DMI) making calibration simple and easy to perform
-
The Road Surface Profiler IV can be upgraded to a Multi-Function Vehicle (MFV)
Main Components in the Portable Road Surface Profiler
The portable Dynatest RSP Mark IV can have 1-2 lasers and two different types of lasers. Both lasers are extremely rugged and reliable, and considered to be the finest laser sensors available for profiling pavements. The main laser used in the RSP IV is an All-In-One 3D displacement sensor. It is possible to select one texture lasers, which would be placed in the wheel path.
Accelerometer
Up to two accelerometers may be provided with the portable RSP. A high stability and durability accelerometer is used. Typically, these will be placed in the wheel paths. The purpose of the accelerometers is to track the vertical motion of the lasers through space.
Photosensor
A photo sensor can optionally be installed on the transducer bar. The photo sensor can be used to ensure that data collection initiates at the same point on multiple data collection runs and to perform DMI calibrations “On the Fly” (both start and stop detection). The photo sensor shines modulated, infrared (IR) light on the pavement and measures the amount of IR reflected. It sends a signal back to the RSP system when the amount of reflected led light exceeds a certain threshold. This threshold is adjustable by the user. The photosensor is a rugged photoelectric sensor with extensive detection principles and the newest laser technology.
Distance Encoder
The distance encoder accurately measures distance.
The encoder produces 2,000 counts per 1 revolution of the vehicle tire making it very accurate and repeatable. Distance resolution is typically on the order of 0.04 in. (1 mm). The wheel encoder for the portable profiler is typically mounted on one of the vehicle’s wheels.
Housing
The laser sensors and accelerometers in the portable RSP Mark IV are placed in the transducer bar. The transducer bar is designed to be easily and quickly installed and removed from the vehicle. The vehicle end of the mounting bracket is equipped with a specially designed expandable steel insert that secures the transducer bar into a standard 2 inch by 2 inch (51 mm by 51 mm) receiver hitch. Expansion of the insert is accomplished by tightening a single bolt that extends through the center of the insert using a 32 mm (1¼ inch) wrench or socket. The transducer bar can be removed from the vehicle simply by loosening the single bolt. The transducer bar is constructed of aluminum and is therefore fairly light and easy to handle. Each adjustable arm has an overall travel of 0.25 m (8 inches). Two handles are provided on the underside of each arm for securing them in the desired position.
The unique Stop & Go function
The “Stop & Go” feature within the Dynatest Road Surface Profilers allows IRI and RN measurements to be taken at all traffic speeds, allowing testing at junctions, traffic lights, roundabouts, and testing of short sections where it is difficult to gain enough speed, or when it is not possible to do a pre-section(tined) concrete.
This function makes it possible to drive under normal circumstances and still avoid a lot of work to cut and connect the measuring data afterward. This saves time & money and ensures correct datasets. No need for rubber banding and no need for calculating averages.
Without this function, it is impossible to test sections of pavements less than 150 meters long or areas where speed has to be reduced below 15-20 km/h such as junctions and roundabouts. It has been shown that without “Stop & Go”, the road owner may not be able to collect data on up to 1/3 of the pavement network.
Measurements Parameters (Road Surface Profiler)
Longitudinal Profile, IRI and Ride Number
The longitudinal profile elevation measurements are obtained by using an accelerometer to monitor vertical vehicle body movement and a laser sensor for measuring the displacement between the vehicle body and the pavement. Road profile elevation measurements are obtained by summing the vehicle body movement with the appropriate body-road displacement. Profile measurements in one or both wheel paths are possible. For the Mark III, if profile elevations are measured in both wheel paths simultaneously, it is also possible to measure profile elevations in the center of the lane, even if only a laser sensor is installed in that position. IRI is calculated in accordance with procedures and specifications outlined in World Bank Technical Paper Number 46 “Guidelines for Conducting and Calibrating Road Roughness Measurements”. Ride Number is calculated using methods outlined in “Measuring & Analysing Road Profiles, National Highway Institute Short Course Manual, University of Michigan, Transportation Research Institute, October 1997”.
Rutting (Mark III only)
With a minimum of five laser sensors, a very simple lane “cross profile” and a simple, separate rut value for each wheel path can be calculated. By adding another two, four, six or more lasers (up to a total of 21), the transverse profile can be defined in greater detail, hence the rutting can be determined more accurately.
Texture
Any or both wheel path laser sensors can be of a texture-capable type employing smaller spot sizes and higher sampling frequencies. For the Mark III, the centerline laser sensor can also be texture-capable. The macrotexture statistics reported are in accordance with the established standard ‘Mean Profile Depth’ (MPD) and Root Mean Square (RMS). Both statistics are computed continuously and can be reported as close as every 100 mm (4 inches). Mean Profile Depth is measured according to ASTM E1845-01 “Standard Practice for Calculating Pavement Macrotexture Mean Profile Depth” and ISO/CD 13473-1 “Characterisation of Pavement Texture Utilising Surface Profiles”.
The profiler can also calculate the RMS (Root Mean Square) of the profile trace, which provides additional useful information regarding pavement texture (for further information, see “High-Speed Texture Measurement Of Pavements”, Kevin K. McGhee, P.E., Gerardo W. Flintsch, Ph.D., P.E., Virginia Polytechnic Institute & State University, Virginia Transportation Research Council, February 2003).
Crossfall, Grade, and Radius of Curvature (Mark III only)
By adding an Inertial Motion Sensor (IMS), the collection of crossfall, grade, and highway curvature information is possible. The IMS is a microprocessor controlled, self-compensating, three-axis solid-state gyro unit. Crossfall is computed as the slope of a linear regression line through the laser elevation measurements, adjusted for roll information obtained by the gyro. Crossfall is displayed and stored in degrees.
Grade is the longitudinal slope of the lane under test. It is displayed and stored in degrees.
Radius of Curve (km or mile) and Curvature (deg/km or deg/mile) of the lane is determined in the horizontal plane. Turn rate (degrees per second) and the vehicle velocity are the basis for these computations.
Laser Elevations and Accelerations
Raw laser elevation data (height of each laser above the pavement surface) and raw vertical acceleration can be stored at user-specified intervals. Elevations determine the Cross-Profile and are useful for verifying rut measurements or providing data from which to calculate rut depths using alternative procedures.
Faulting
Faulting on jointed concrete pavements can be detected according to “Standard Practice for Estimating Faulting of Concrete Pavements AASHTO Designation: PP39-99”. The RSP field program provides ample flexibility for the user to specify and/or modify the definition of a fault.